
최근 개인서비스로봇을 비롯해 전문서비스로봇 등 우리 생활 속 로봇의 활용이 크게 확대되고 있다. 지난 1월 31일에는 서울 중구에 위치한 제일제면소 서울역사점 매장에 LG 클로이 서브봇이 첫 출근해 눈길을 끌기도 했다. 이처럼 다양한 종류의 로봇이 상용화 되고 있지만 로봇 사용의 지속성 측면에서는 아직까지 한계가 있는 상황이다. 사람들의 흥미를 끌고, 편의를 주는 등 순기능에도 서비스 제공에 있어 단편적인 대화가 가능한 수준에 불과한 까닭이다.
지난 2월 7일 서울 성북구 한국과학기술연구원(KIST)에서 만난 최종석 로봇미디어연구소장 직무대행은 현존하는 로봇들을 지속적으로 사용하고자 하는 욕구가 생기지 않는 이유에 대해 “사회적 기능이 부재하기 때문”이라고 지적했다.
최 소장은 “최근 로봇기술이 인간 생활에 깊숙이 들어옴에 따라, 사람들은 로봇이 ‘동반자’ ‘친구’ ‘집사’ 등 사회성을 보유한 사람의 역할을 수행하거나 보조해 줄 것을 기대하게 됐다”며 “‘센서융합 기반 휴먼인식 및 소셜 로봇지능 원천기술’은 요즘과 같은 초고령 사회의 독거노인을 위한 복지 분야, 1인 1가구 증대에 따른 개인서비스로봇 분야, 자폐 또는 인지 장애를 겪고 있는 분들을 위한 조호 서비스 분야 등에 활용 가능할 것”이라고 말했다.
-국내 로봇 기술 수준은 어디쯤 와 있나요?
“로봇의 기구부 및 디자인 등의 외형을 이루는 하드웨어는 세계적 수준입니다다만 모터·센서·제어기 등 핵심부품은 대체로 수입에 의존하고 있으며, 인공지능을 비롯해 사람과의 상호작용에 필요한 로봇 소프트웨어 기술은 아직 해결해야 할 숙제들이 많습니다.”
-현재 국내 상용 가능한 로봇의 종류는요?
“로봇 분야 별로 다양합니다. 우선 전문서비스로봇 분야에서는 다빈치 로봇과 같은 수술로봇 등이 있고, 개인서비스로봇 분야에서는 잘 알려져 있는 청소 로봇을 떠올릴 수 있으며 최근 페퍼를 비롯한 다양한 소셜로봇이 상용화 되고 있습니다. 군용로봇, 농업용로봇 등 필드로봇 분야도 상용화가 이뤄지고 있습니다.”
-‘센서융합 기반 휴먼인식 및 소셜 로봇지능 원천기술’이란 무엇인가요?
“로봇이 인간과 더불어 공존하기 위해서는 우선 사람을 인식해야 합니다. 즉 어떤 사람이 로봇 주변 어디에서 무슨 행동을 하는 지에 대한 인식을 하기 위해서는 하나의 센서 만으로는 얻을 수 있는 정보가 매우 한정적이어서 여러 종류 및 여러 개의 센서 정보를 융합해야 하는 것이 센서융합 기반 휴먼인식입니다. 여기서는 여러 센서를 쉽게 확장할 수 있는 유연한 소프트웨어 기술이 필요합니다. 또 로봇이 사람의 행동이나 말을 인식함에 있어 단편적인 내용보다 어떤 것을 원하는지에 대한 의도를 파악하고, 이에 따라 사람이 이해하고 받아들일 수 있는(사회성 있는) 수준으로 로봇이 행동이나 대화 표현을 할 수 있도록 하는 것이 소셜 로봇지능 기술이라 할 수 있습니다.”
-어디에 특화된 로봇인가요?
“개인서비스로봇, 그 중에서도 소셜로봇에 특화되었다고 할 수 있으며, 장기적으로는 다른 로봇 분야에도 확장 적용 가능한 로봇 기술입니다.”
-센서가 융합됐다는 것은 무엇을 의미하나요?
“다수의 센서가 임의의 시간에 각각의 정보를 보내 올 때, 이들을 취사선택, 취합하거나 새로운 내용으로 변환해 보다 의미 있는 정보를 생성해 내는 것을 뜻합니다. 가령 여러 사람의 위치를 인식함에 있어서 하나의 카메라(카메라 1)가 볼 수 있는 영역에는 한계가 있어서 사람들의 일부만 보이는 경우가 있는데, 추가 센서(카메라 2)를 사용하면 카메라 1이 보는 사람들의 일부를 중복해서 볼 수도 있고 카메라 1이 보지 못하는 사람들을 추가로 확인할 수도 있습니다. 이 때 중요한 것은 여러 사람들 중에 두 카메라에서 동시에 중복돼 확인 되는 사람이 누구이고 각기 따로 확인 되는 사람이 누구인지는 미리 알 수 없기에 이들을 기술적으로 구분하는 것이 중요합니다. 즉, 다수의 센서로부터 들어오는 정보의 일부가 동일 정보를 중복해서 보내오고 있는 것인지 아니면 새로운 정보를 받는 것인지에 대한 구분을 해서, 보다 많은 양의 정보를 생성하되 정확한 정보로 융합을 하는 것이 중요합니다.”
-위 기술을 활용하면 어떤 효과를 기대할 수 있나요?
“여러 사람이 존재하거나 움직이는 공간에서 로봇이나 시스템이 적절한 대응이 필요한 사람을 추적 또는 감시하며 상호작용을 수행할 수 있습니다. 이에 따라 공공장소의 안전·보안이나 쇼핑몰의 매장별 고객 접근빈도 조사 등에 활용될 수 있습니다.”
-어떻게 사람을 인식할 수 있나요?
“우선 다수의 깊이센서(depth sensor)를 통해 사람의 위치를 파악한 뒤, 그 위치로 카메라를 줌인(zoom-in) 하여 얼굴인식을 수행하게 됩니다. 여기서 위치인식이나 얼굴인식을 수행함에 있어 최근의 딥러닝 기반의 인공지능 기법이 활용됩니다.”
-로봇에 사회적 기능이 필요한 이유는 뭔가요?
“최근 로봇기술이 인간 생활에 깊숙이 들어오게 되면서 사람들은 로봇이 ‘동반자’ ‘친구’ ‘집사’ 등 사회성을 보유한 사람의 역할을 수행하거나 보조해 줄 것을 기대하게 되었습니다. 이에 따라 로봇은 사용자 및 주변 환경을 인식해 사용자 관점에서 예측할 수 있고 사회적으로 수용할 수 있는 지능 즉, 소셜지능을 포함한 사회적 기능을 확보할 필요가 있습니다. 현존 로봇들이 대부분 이러한 사회적 기능이 부재하기 때문에 잠깐 사용해 보다가도 금방 질리거나 지속적으로 사용해 보고자 하는 욕구가 유발되지 않는 경우가 많습니다.”
-정신적인 부분에서는 어떻게 도움을 줄 수 있나요?
“가령 사용자의 행동 및 발화 내용을 분석해 그 사람의 성격을 인식해 그에 맞게 적절한 대응을 해주거나, 사용자의 의도나 감정을 파악해 이에 맞는 서비스를 수행하게 되면, 이는 동반자 로봇으로서 사용자에게 필요한 개인맞춤형 소셜로봇 기능을 구현하는 것이라 할 수 있습니다.”
-사회문제 해결에도 도움이 될까요?
“요즘과 같은 초고령 사회의 독거노인을 위한 복지 분야, 1인1가구 증대에 따른 개인서비스로봇 분야, 자폐 또는 인지 장애를 겪고 있는 분들을 위한 조호 서비스 분야 등에 활용 가능하리라 판단됩니다.”
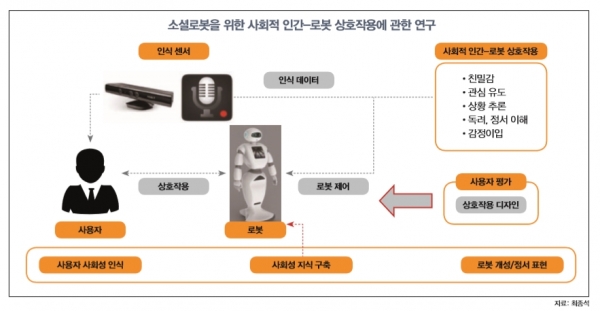
사회적 인간-로봇 상호작용에 관한 연구 그림.<최종석>
-그간 중점적으로 연구하신 것은 무엇인가요?
“소셜로봇 지능 구현을 위해 로봇이 인간의 성격이나 의도를 이해하고 이에 적합한 행동 표현을 통해 지속적인 서비스를 제공해 줄 수 있는 사회적 인간-로봇 상호작용에 관한 연구를 진행하고 있습니다.”
-현재 기술 개발 단계는 어디쯤 인가요?
“매우 기초적인 단계라 할 수 있습니다. 사람의 성격을 인식함에 있어 발화 목소리의 톤이나 빠르기, 몸동작의 속도, 발화에 사용되는 언어 등을 분석해 5가지 성격(Big-5 Model: 개방성(Openness), 성실성(Conscientiousness), 외향성(Extraversion), 친밀성(Agreeableness), 신경질성(Neutroticism)에 대한 고·중·저를 자동으로 평가하는 기술개발을 수행하고 있으나 아직 정확도가 70%를 넘지 못합니다.”
-기술 완성도를 높이기 위해 보완돼야 할 부분은 없나요?“
“인간의 의도 파악을 위해 기본적인 인식 뿐 아니라 장시간의 학습과 누적된 정보를 기반으로 한 복합적인 추론 능력도 필요한데, 지금은 단편적이고 단기적인 인식 수준입니다. 또한 로봇의 행동 표현에 있어서도 동작과 발화가 동기화 되어 자연스럽게 생성되는 복합표현(synchronized multi-modal expression)도 지속적인 개발이 필요한 단계라 할 수 있습니다.”
-미래 100대 기술로서 앞으로 어떻게 발전할 가능성이 있다고 생각하시나요?
“소셜로봇 분야는 로봇공학 뿐 아니라 심리, 디자인, 의료 등 다학제적인 융합연구 분야로서 발전해 나갈 것입니다. 일반인의 사용경험 축적을 통해 그 기술이 향상될 수 있는 플랫폼 기술로서의 발전도 가능할 것 같습니다.”
----------------------------------------------------------------------------------------
최종석 소장은?
1990~1994년 한국과학기술원(KAIST) 전기 및 전자공학 학사
1994~1996년 한국과학기술원(KAIST) 전기 및 전자공학 석사
1996~2001년 한국과학기술원(KAIST) 전기 및 전자공학 박사
2001년~ 한국과학기술연구원(KIST) 연구원·선임연구원·책임연구원
2004~2004년 MIT CSAIL 방문연구원
2016~2019년 한국로봇학회 학술이사
2017년~ 한국과학기술연구원(KIST) 지능로봇연구단 단장
2017년~ 한국과학기술연합대학원(UST) KIST스쿨 NT-IT 융합전공 교수 (HCI 및 로봇 세부전공 주임교수)
2017년~ 소셜로봇연구회 회장
2019년~ 한국과학기술연구원(KIST) 로봇미디어연구소 소장 직무대행
인사이트코리아, INSIGHTKOREA
